map_LS_WILL :
千葉市花見川区み春野の個別指導 学習塾『LS WILL』
千葉市花見川区み春野の個別指導 学習塾『LS WILL』
学習コラム
入校の流れ
伸びる理由
当校について
よくある質問
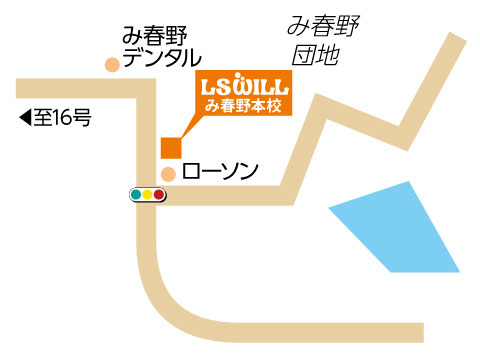
アクセス
map_LS_WILL
✉︎
お問合せはこちら!
map_LS_WILL_yotsukaido→